СЕРВИС ПО ВЫБОРУ ДАТЧИКОВ
Рынок датчиков 2022. Часть 4. Sensor market 2022. Part 4.
25.01.2023
Рынок датчиков 2022. Часть 4.
Датчики для задач измерения перемещений объектов. Датчики для задач позиционирования на примере продукции компании “Пепперл + Фукс”.

Краткая историческая справка о компании “Пепперл + Фукс”.
Компания была основана в 1945 году в Западной Германии сразу после окончания войны. Радиоинженер Вальтер Пепперл и банковский служащий Людвиг Фукс объединили свои усилия. В то послевоенное время в Германии создавалось довольно большое число электротехнических компаний.
В 50-е годы компания занималась ремонтом радиоприёмников, производством трансформаторов, и компания начала сотрудничать с крупными промышленными предприятиями, например, с химическим производством BASF. В те годы крупные производства применяли электромеханические переключатели, которые в агрессивной среде работали ненадёжно.
В те же 50-е годы в мире начался взрывной рост применения полупроводниковой техники в самых разных отраслях хозяйства. Большое количество разнообразных полупроводниковых схем было придумано и запатентовано.
Молодой инженер Вилфрид Гель начал сотрудничать с компанией “Пепперл + Фукс”. В результате их сотрудничества появилась новая разработка – бесконтактный транзисторный датчик, который реагировал на приближение металлической пластинки. Такие устройства оказались удобной, надёжной альтернативой электромеханическим переключателям, особенно для работы в парах агрессивных веществ. Первый индуктивный датчик компания “Пепперл + Фукс” предложила в 1958 году. Позднее, в 1961 году, Фуксом и Гелем был получен патент на “устройство преобразования механического движения в соответствующий электрический сигнал”.
Многие немецкие, японские, американские компании в конце 50-х – начале 60-х работали в этой области. Появилось значительное количество патентов, особенно в 60-х годах: американские компании патентовали разнообразные полупроводниковые схемы, а немецкие компании патентовали конкретные устройства – выключатели, переключатели, сигнализаторы и т.д.
Позднее к тематике индуктивных датчиков подключились компании Weber, Klaschka, Turck, Balluff. Ещё позднее – ifm electronic, Baumer, Contrinex, Allen Bradley.
1966 год - все 100% использованных переключателей на рынке США всё ещё были электромеханическими.
1976 год - доля всех типов полупроводниковых датчиков на рынке США достигла 30 % в долларовом выражении.
В настоящий момент у компании “Пепперл + Фукс” разнообразные датчики составляют существенную долю ассортимента.
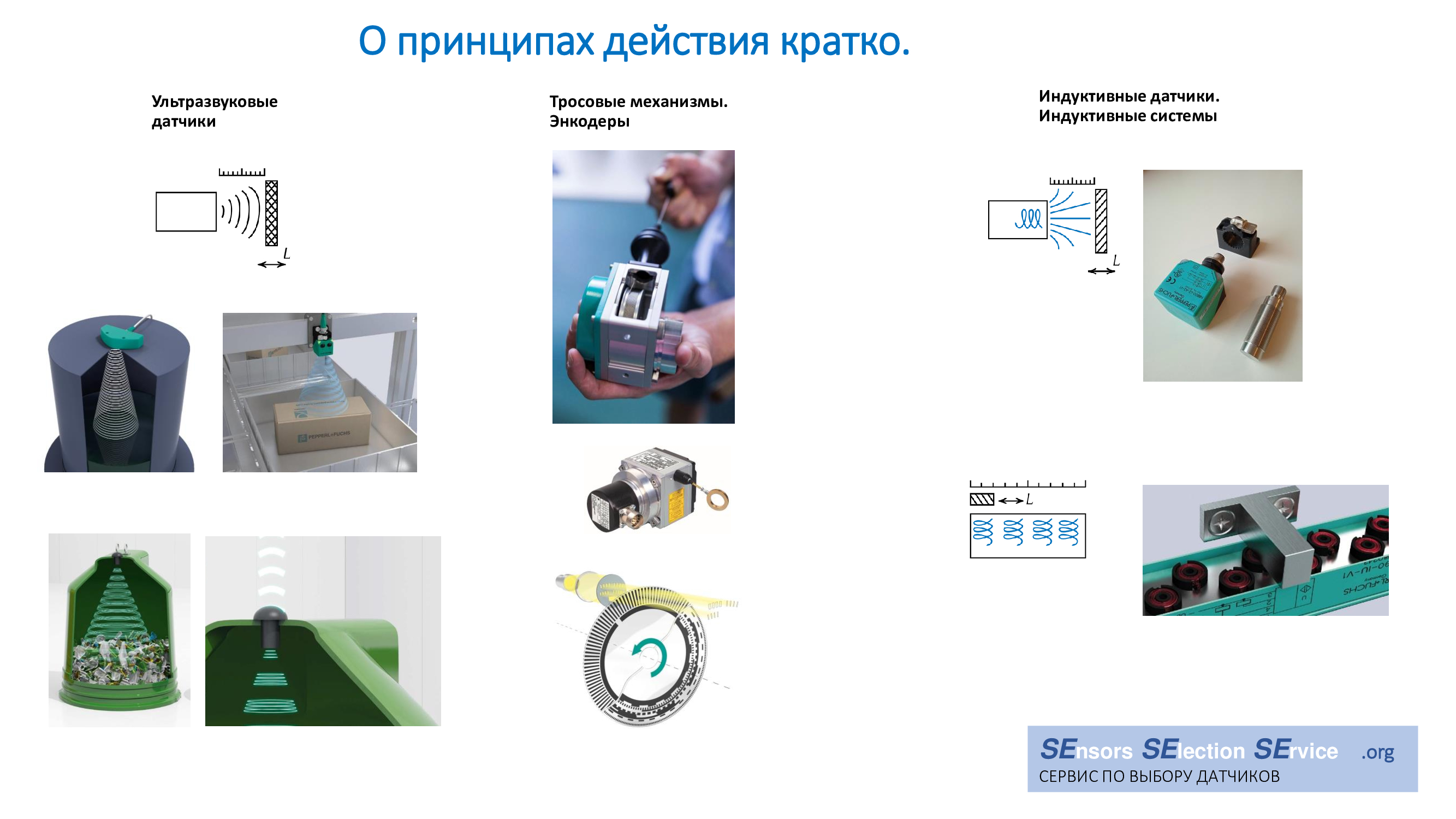
Принципы действия различных датчиков.
Ультразвуковой датчик
для измерения дистанций, для обнаружения объекта на расстоянии. Излучателем и приёмником УЗ сигнала является пьезоэлектрик (чаще всего). Применяется частота излучения от нескольких десятков до нескольких сотен килогерц. Сигнал от датчика распространяется до объекта, отражается от объекта и возвращается назад к датчику в виде ослабленного «эха». Датчик измеряет промежуток времени для полёта сигнала туда-обратно и по известной скорости ультразвука в воздущной среде датчик вычисляет дистанцию до объекта. Объектами-отражателями могут быть твёрдые, жидкие, сыпучие, рыхлые материалы.
На рисунках с зелёными контейнерами поясняется разработка модуля, который содержит:
-УЗ датчик, измеряющий уровень наполнения контейнера мусором,
-радио-передатчик/приёмник, посылающий в эфир результаты измерения уровня,
-радиоантенну, батарею длительного питания, хорошо герметизированный корпус.
Тросовый механизм
представляет из себя полый барабан, на который в один слой наматывается стальной трос. Если наконечник троса отпустить, то трос намотается на барабан под действием встроенной в механизм пружины. Разматывание троса происходит с преодолением силы пружины. Если к оси барабана пристыковать энкодер (инкрементный или абсолютный), то вращающимся энкодером можно измерить линейные перемещения наконечника троса.
Индуктивные датчики. Индуктивные системы.
Индуктивный датчик обычно имеет компактную чувствительную поверхность. Когда к этой поверхности приближается вихретоковый материал, чаще всего металл, датчик это обнаруживает.
В индуктивных системах имеется достаточно протяжённая чувствительная поверхность, в таком датчике имеется несколько чувствительных элементов. С помощью индуктивной системы можно измерить перемещение куска металла вдоль чувствительной поверхности датчика.

Принципы действия различных датчиков.
Оптическая система с кодовой лентой. Оптическая камера двигается вдоль кодовой ленты на некотором расстоянии от ленты. На ленту нанесены неповторяющиеся матричные коды. Во время движения камера считывает матричные (двухкоординатные) коды с ленты и определяет своё абсолютное положение относительно ленты. Поскольку коды двухкоординатные, то камера определяет своё положение относительно лены по двум координатам.
Лазерные дальномеры time-of-flight.
Такой фотодатчик излучает световые импульсы, обычно модулированные, и воспринимает световые сигналы, отражённые объектом. По времени распространения сигнала туда и обратно вычисляется расстояние до объекта. Такие дальномеры уверенно улавливают отражённые сигналы от произвольных объектов на расстояниях до 20 … 30 метров. При бОльших дистанциях требуется на объекте устанавливать оптический отражатель.
Оптические системы с кодовым рельсом.
Система состоит из «П»-образной оптической головки и кодового рельса (“рельс” – полоса из жёсткого материала). Информация об абсолютном положении находится в чередующихся прозрачных и непрозрачных участках рельса. Оптическая головка двигается вдоль рельса, не касаясь рельса, и считывает абсолютные коды с рельса. Таким образом измеряется абсолютное перемещение головки относительно рельса.
Принципы действия различных датчиков.
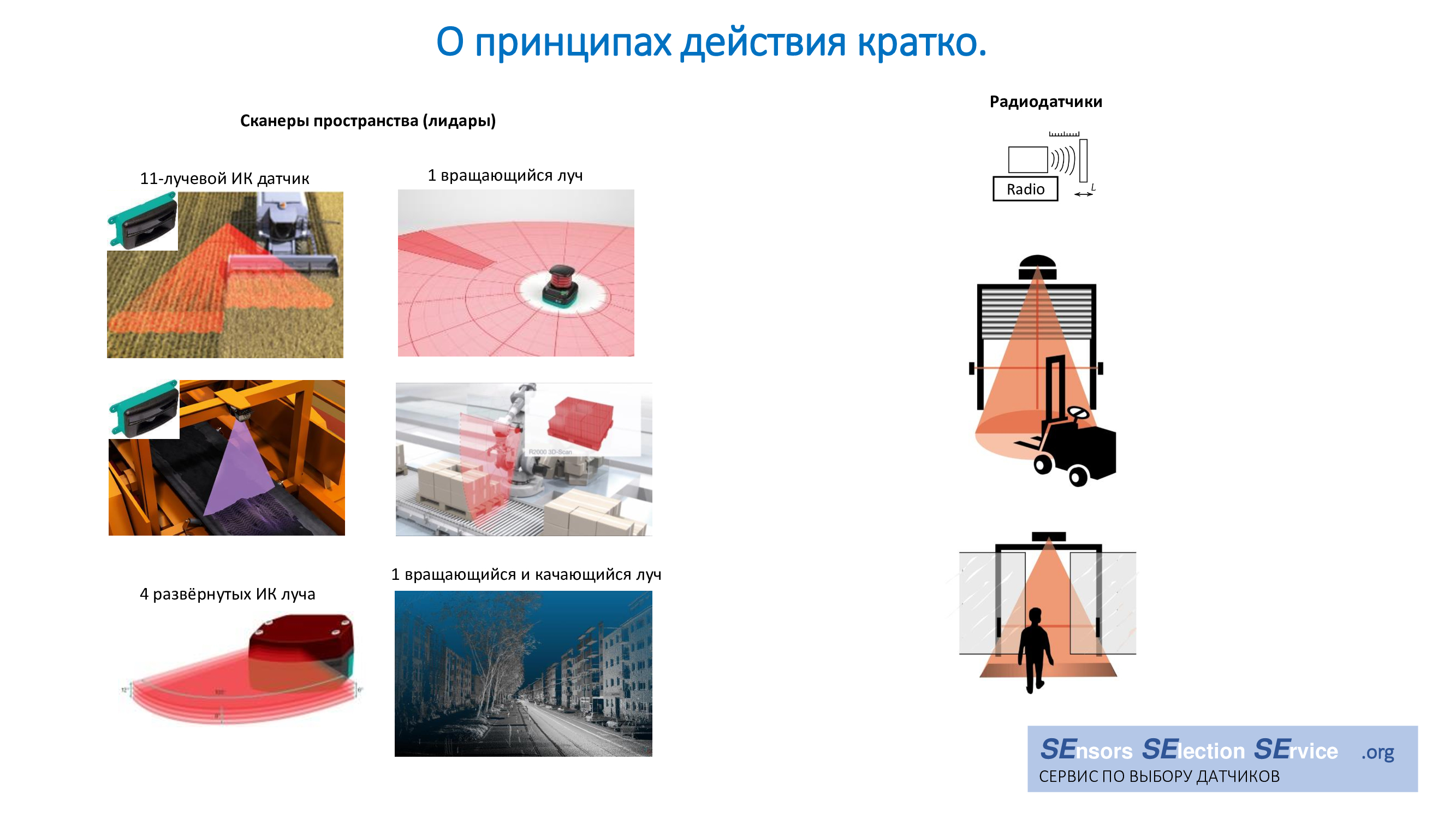
Сканеры пространства (лидары).
11-лучевой лидар – в одном корпусе объединены 11 ИК дальномеров, при этом, каждый дальномер измеряет дистанцию в своём определённом участке пространства. Совокупно такой лидар захватывает угол 88 градусов и может измерить поверхностную конфигурацию объекта (профиль), находящегося внутри захватываемого пространства.
4-лучевой лидар. Здесь 4 ИК луча находятся один выше другого, захватывая по вертикали больше пространства, чем мог бы захватить один луч. Разворачивание лучей здесь происходит без участия механизмов (нет движущихся деталей), а только за счёт полупроводниковой оптики. Для удобства настройки, для маркирования захватываемого лучами пространства имеется ещё один вспомогательный 5-й луч - видимый красный. Его развёртка в пространстве производится вращающимся зеркалом.
Лидар с одним вращающимся лучом. Это оптический дальномер с одним лучом. Вращение луча осуществляется быстрым вращением зеркала. Такой лидар имеет угол обзора 360 градусов. Если обеспечить внешним механизмом качание луча по вертикали, то можно с помощью подобного лидара построить трёхмерную картинку пространства, как на фотографии улицы.
Радиодатчики.
“RADAR” = RAdio Detecting And Ranging. С распространением оптических и ультразвуковых датчиков, работающих на времяпролётном принципе иногда требуется уточнение, когда говорят “радар”. Однако, в этом разделе обсуждаются именно радио-радары. Складывается впечатление, что в последние годы происходит существенное расширение списка производителей радио-датчиков, а, значит, идёт удешевление изделий по причине конкуренции. Чаще всего находят применение следующие радио-датчики:
=датчики, применяющие эффект Допплера – обнаруживают двигающиеся объекты; неподвижные объекты не обнаруживаются;
=радио-дальномеры – работают на времяпролётном принципе, измеряют дистанции до объекта неподвижного или движущегося.
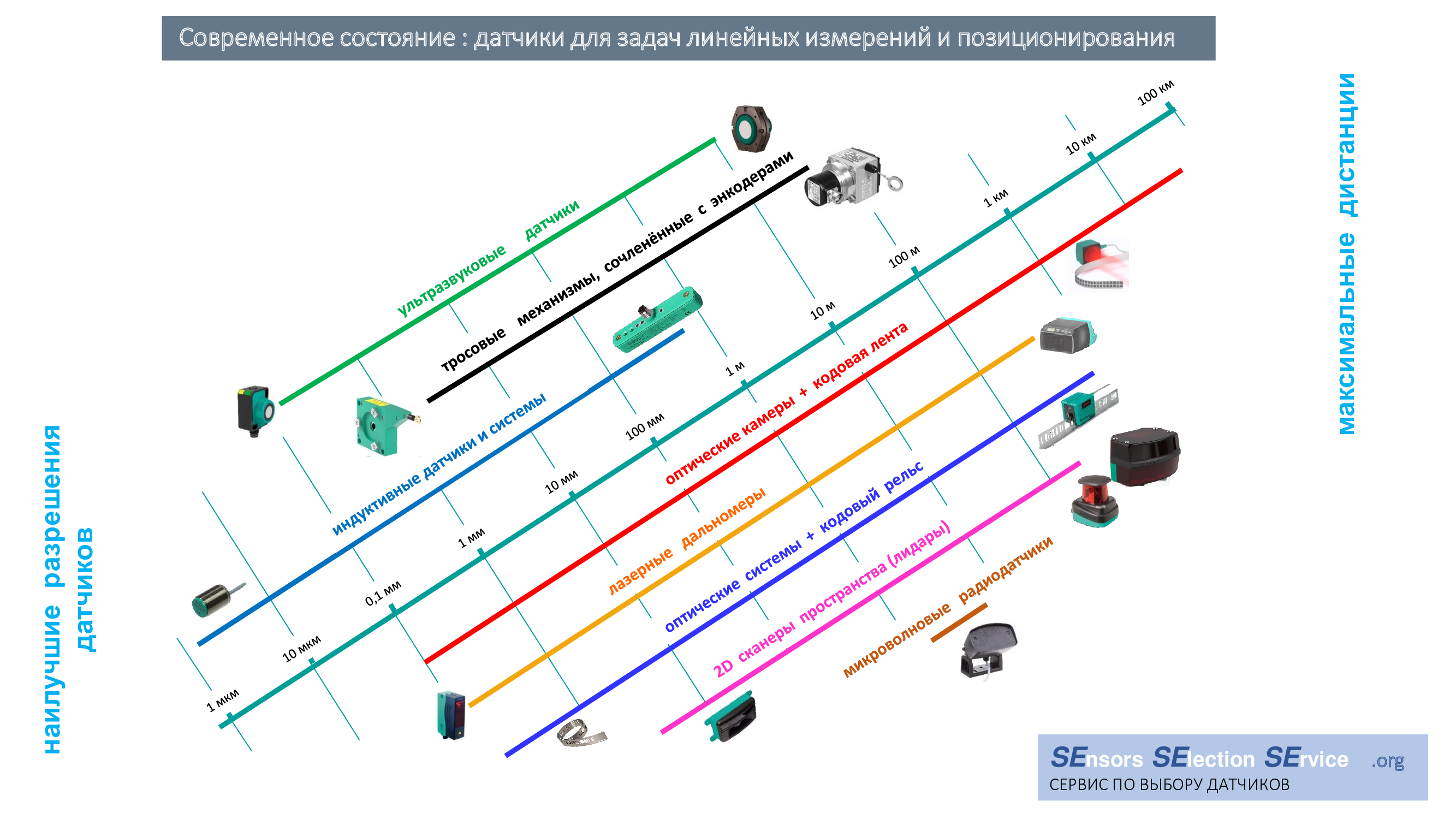
Современное состояние: датчики для задач линейных измерений и позиционирования.
На слайде показаны измерительные возможности датчиков положения различных принципов действия применительно к настоящему состоянию этих датчиков у производителя «Пепперл+Фукс».
Линия конкретного цвета обозначает начало и конец диапазона измерения для конкретного типа датчиков. Все линии размещены на единой логарифмической оси дистанций: от 1 микрона до 100 километров. Начало каждой цветной линии показывает примерную разрешающую способность конкретного типа датчиков, конец каждой цветной линии показывает максимальную рабочую дистанцию.
наилучшее максим. рабочие
разрешение дистанции
ультразвуковые датчики десятые доли mm до 10 m
трос. механ-мы с энкодерами единицы mm до 60 m
индуктив. датчики и системы единицы микрон до 960 mm
оптич. камеры с кодовой лентой десятые доли mm до 100 km
лазерные дальномеры десятые доли mm до 300 m
оптич. системы с кодовым рельс. десятые доли mm до 620 m
лидары единицы mm до 200 m
радиодатчики ---- до 6 m
Таким образом, в пределах всего лишь одной иллюстрации наглядно сопоставлены возможности датчиков положения, сопоставлены рабочие дистанции и разрешающие способности датчиков различных принципов действия для изделий одного производителя. Здесь практически можно осуществить выбор датчиков положения, руководствуясь поставленной технической задачей в сфере автоматизации производства.
Полезные ссылки:

Портал с разнообразной, интересной, систематизированной информацией о датчиках. Смежные знания.
Узнать больше