СЕРВИС ПО ВЫБОРУ ДАТЧИКОВ
Рынок датчиков 2022. Часть 3. Sensor market 2022. Part 3.
26.01.2023
Рынок датчиков 2022. Часть 3.
Что такое автоматизация с точки зрения Теории Автоматического Управления ?
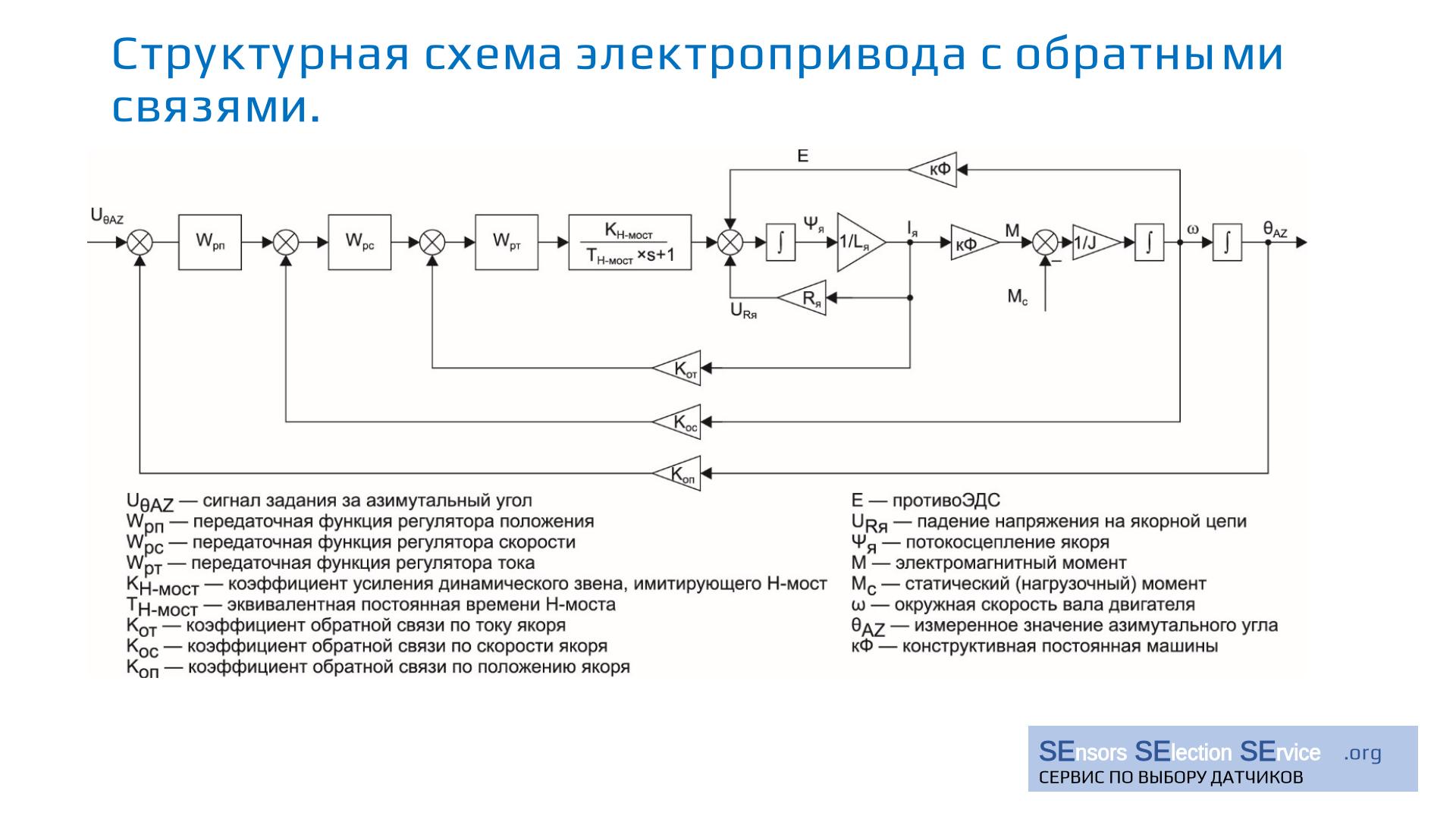
Типичная структурная схема электропривода с обратными связями (взято из открытых источников).
Здесь приведена типичная структура электропривода с обратными связями:
-по току,
-по скорости,
-по положению.
(Конечно, могут быть и другие, более хитрые обратные связи в приводах. Но, не будем уходить в эту сторону.)
Структурная схема в теории автоматического управления - это, по существу, структурно - графическое изображение дифференциального уравнения. К примеру, приведённая структура – это дифференциальное уравнение 4-го порядка. Для достаточно точного описания процессов в замкнутых электроприводах, следящих электроприводах обычно вполне достаточно дифференциального уравнения 3-го порядка.
Датчик тока (ток – Iя), датчик скорости (скорость – ω), датчик положения (положение - θAZ) на приведённой структурной схеме изображаются очень просто и лаконично в виде точек.
В реальности же эти датчики могут быть весьма сложными электронными или электронно-механическими устройствами,
о которых пойдёт речь в следующих частях настоящей публикации.
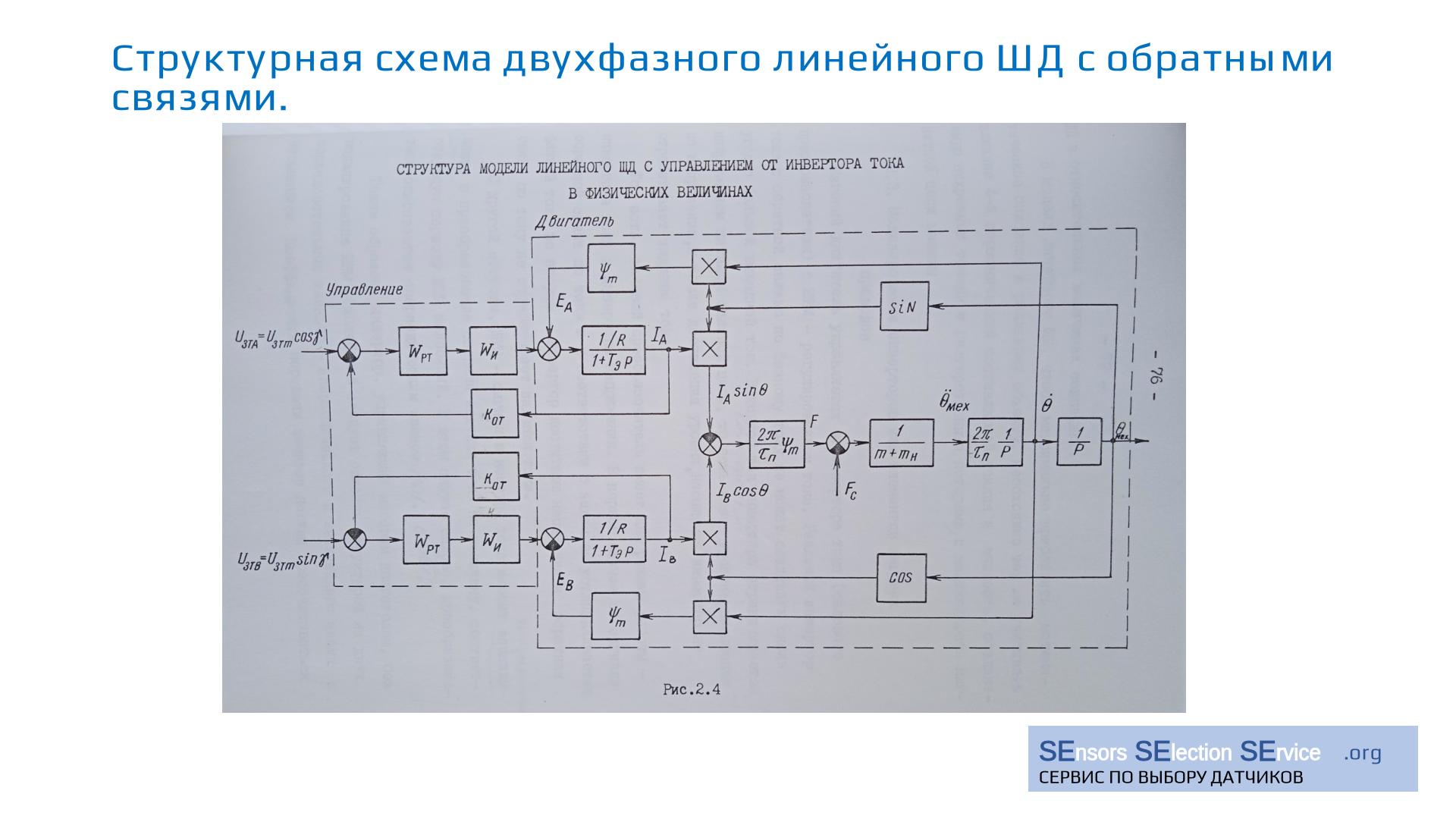
Структурная линейного шагового двигателя с обратными связями (взято из открытых источников).
(Линейный шаговый двигатель - ШД, значит, двигающийся линейно, а не вращательно.)
На слайде приведена реальная структура двухфазного ШД с обратными связями:
-по току,
-по скорости,
-по положению.
Дифференциальное уравнение 3-го порядка.
Аналогично : датчики тока (фаза А - IА , фаза B – IB), датчик скорости (скорость – θ'), датчик положения (положение – θмех). Датчики тока, скорости и положения изображены на структуре в виде простых точек.
Видео с телеграм-канала “ДатчикиNews”: https://t.me/sensorsnews/754
На видео: работа прямого линейного привода.
Задача привода: перемещение грузовой платформы по одной координате с заданной скоростью.
Электродвигатель – синхронная машина с постоянными магнитами на пассивной (подвижной) части. Около неподвижных якорей парами расположены sin / cos магнитные инкрементные датчики. Опорами являются стальные шарики, катящиеся по направляющим. Качество движения обеспечивается обратными связями (т. е. датчиками) и алгоритмами управления.
-Разработка Национального исследовательского ун-та МЭИ, 2018 г.
-Тип машины: синхронная пазовая с постоянными магнитами;
-Пассивная часть двигателя (платформа) с измерительной шкалой и магнитами перемещается над якорями и датчиками;
-Два инкрементных датчика перемещения с элементами Холла возле каждого якоря; каждый магнитный датчик создаёт sin / cos сигнал о движении; сигнал используется для вычисления положения платформы и коммутации электронных ключей;
-Скорость 2 m/s,
-Точность перемещений 0,3 mm,
-Ход 800 mm,
-Грузоподъёмность 10 kg.
Источник: Л.Н.Рассудов, А.П.Балковой и др.. Каф. АЭП МЭИ. Разработки опытных образцов автоматических транспортных линий
с прямым приводом.- XXIII Всерос.конф. по АЭП.- Тула, 28 сент. 2022.
Видео с телеграм-канала “ДатчикиNews”: https://t.me/sensorsnews/756
На видео: работа планарного стола с высоким разрешением.
Задача: перемещение планарного X-Y стола по двум координатам с заданными точностью и скоростью.
Двухкоординатный стол построен на 4-х синхронных машинах с возбуждением от постоянных магнитов, катушки двигателей - на неподвижной части, магниты – на подвижной части стола. Четыре пневмоопоры. Качество движения обеспечивается обратными связями, т.е. датчиками, и алгоритмами управления.
-Разработка Национального исследовательского ун-та МЭИ, 2015 г.
-Разрешение позиционирования стола 5 nm
(аттестация проводилась многоосевым интерферометром разрешения 0,1 nm);
-Скорость стола до 100 mm / s;
-Ускорение до 4 m/s/s;
(При нанометровых точностях движения уже имеют значение шумы силового преобразователя, шумы шир.-импульсной модуляции, шумы обратных связей по току и положению, ошибки интерполяции датчиков положения, ошибки квантования АЦП, механические резонансы и возмущения и т.д.);
-Применение стола: в системе подачи кремниевой пластины, в оптической инспекции готовых полупроводников и т.д.;
диаметр кремниевой пластины 300 mm (перспектива - 450 mm);
-Проектные нормы в производстве: 14; 10; 7 nm (перспектива 5 и 3 nm - TSMC, Тайвань);
-Двигатели: 4 синхронных машина с возбуждением от постоянных магнитов, с беспазовым якорем;
катушки на неподвижной части, магниты на подвижной части;
-4 пневмоопоры, основания опор - гранитная плита, зазор в опорах 5 микрон;
-Применён двухкоординатный оптич.датчик положения 105 х 89 mm;
Источник: М.Г.Тяпкин, О.А.Толстых, А.П.Балковой, Г.М.Тяпкин. Каф.АЭП МЭИ. Планарный стол с позиционным разрешением 5 nm для микроэлектронных технологий.
Полезные ссылки:

Портал с разнообразной, интересной, систематизированной информацией о датчиках. Смежные знания.
Узнать больше