СЕРВИС ПО ВЫБОРУ ДАТЧИКОВ
Рынок датчиков 2022. Часть 2. Sensor market 2022. Part 2.
27.01.2023
Рынок датчиков. Часть 2.
Что такое автоматизация в промышленности ? Иллюстрации об этом представлены в «Части 2».
Слово “промышленность” здесь следует толковать широко - самые разные отрасли народного хозяйства.
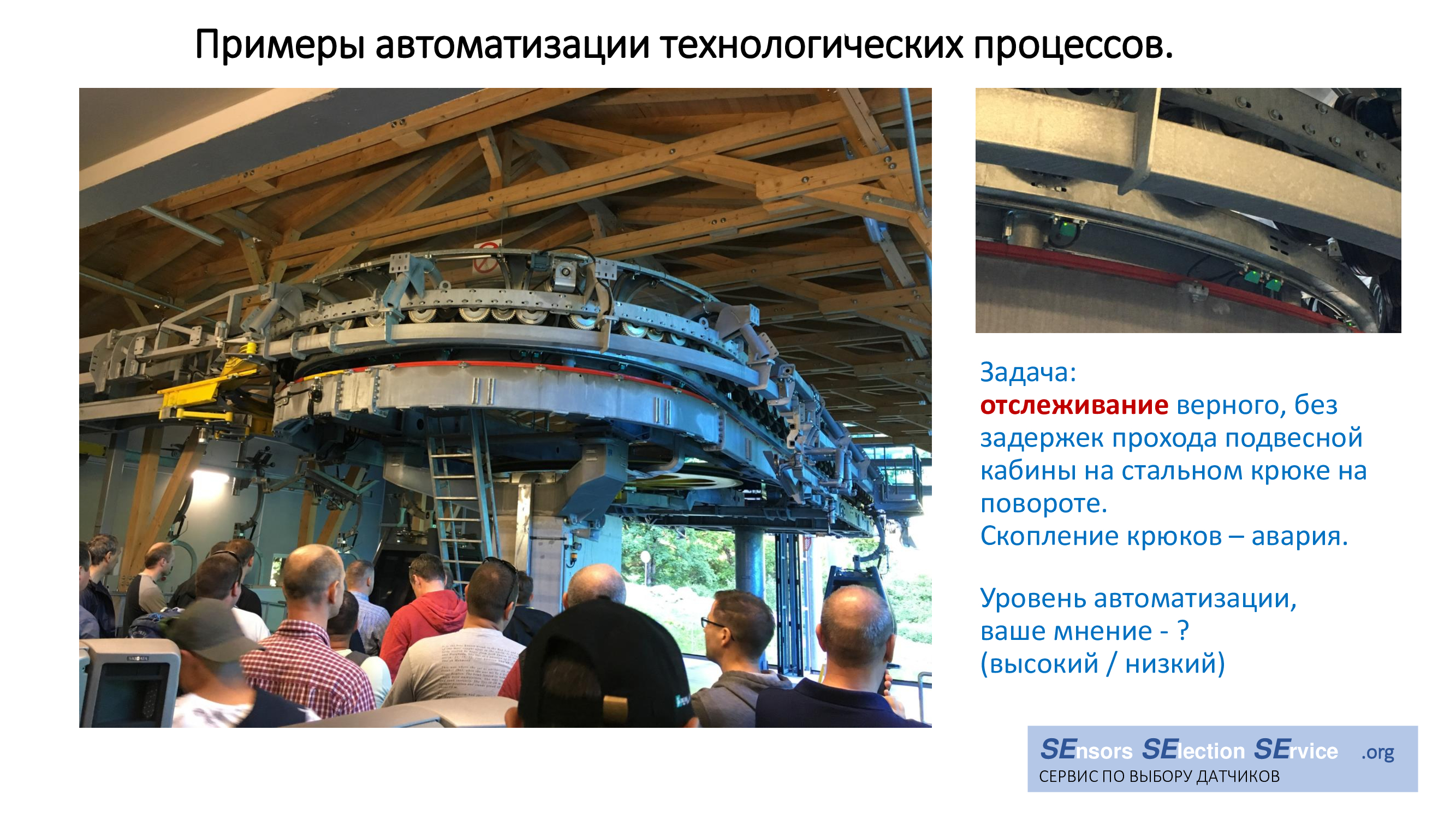
В месте высадки / посадки пассажиров канатной дороги: индуктивными датчиками контролируется нормальное прохождение пассажирской кабины, которая висит на стальном крюке. Скопление крюков (кабин) в одном месте – это аварийная ситуация. Задача индуктивных датчиков обнаруживать скопление крюков (кабин), если такое возникнет.
Индуктивные датчики, которые видны на фото в зелёных квадратных корпусах, расположены вдоль закруглённой подвесной опоры из оцинкованного металла.
Видео с телеграм-канала "ДатчикиNews" : https://t.me/sensorsnews/735
На видео: прессово-штамповочное производство.
Задача: верное, точное позиционирование стального листа в вырубном прессе. Привод, подающий стальные листы в пресс, должен обеспечивать бесперебойную подачу строго ( ! ) по одному листу, причём лист должен расположиться в прессе правильно с хорошей точностью, иначе, пресс вырубит деталь неверно, то есть с браком.
Скорее всего, перед прессом стоят индуктивные датчики обнаруживающие подачу двойного листа. Скорее всего, подающий привод имеет датчики положения для определения верного позиционирования листа в прессе.
Кроме того, по нормам безопасности производства, такое весьма опасное прессовое оборудование должно быть огорожено с соответствующими датчиками безопасности, подтверждающими целостность, ненарушенность периметра безопасности.
Видео с телеграм-канал "Комплектующие для автоматизации" : https://t.me/c/1177621406/142
На видео: транспортировка продукции на конвейере.
Задача: перемещение поддонов с готовой продукцией. Заключительный контрольный этап (перед отгрузкой потребителю или перед помещением на склад).
Ролик показывает заключительный этап транспортировки: продукция уже сгруппирована на поддоне и упакована с боков стрейч-плёнкой. Поддон приезжает по конвейеру к служащему-контролёру, контролёр производит визуальный выборочный контроль продукции и приклеивает метку поверх стрейч-плёнки.
Очевидно, что для организации перемещения поддона с продукцией применяется на конвейере значительное количество оптических датчиков. Возможно, происходит взвешивание на конвейере.
В месте, где поддон поворачивается на 90 градусов, вероятно, стоят индуктивные датчики.
На переднем плане видна оптическая камера (в сине-чёрном корпусе), очевидно, что камера считывает метки штрих-кодов, которые приклеены поверх стрейч-плёнки. Очевидно, что каким-то техническим способом здесь обеспечивается безопасность человека-контролёра, чтобы человек не попал в ролики, двигающие поддон. (Возможно, имеется коврик безопасности на полу, который не виден с этого ракурса или что-то иное.)
Видео с телеграм-канал "Комплектующие для автоматизации" : https://t.me/c/1177621406/145
На видео: складирование готовой продукции на автоматизированном складе.
Задача: перемещение поддона с готовой продукцией к ячейке хранения на автоматизированном складе. Поддон с упакованной продукцией по конвейеру поступил на склад готовой продукции. Далее необходимо этот поддон увезти в определённую ячейку для хранения. Для этого к поддону подъезжает автоматический штабелёр, штабелёр вилочным захватом берёт поддон и увозит поддон к нужной ячейке для хранения.
Очевидно, что здесь применяются оптические датчики для обнаружения правильного захвата поддона вилкой штабелёра, правильной разгрузки вилки, имеется система измерения абсолютного перемещения штабелёра по двум координатам.
Видео с телеграм-канал "Комплектующие для автоматизации" : https://t.me/c/1177621406/146
На видео: перемещение автоматического погрузчика внутри помещения.
Задача: перемещение беспилотного электропогрузчика внутри складских помещений банка по определённой траектории
с одновременным обеспечением безопасности для персонала. По существу, такой погрузчик в полной мере является беспилотным транспортом.
Скорее всего траектория движения погрузчика контролируется оптическим сканером (лидаром) типа R 2000 компании Pepperl+Fuchs. Этот лидар помещён на стойку в наивысшую точку погрузчика. Кроме того, в нижней части погрузчика (около пола) виден ещё один лидар – лидар системы безопасности. Его задача – на ближней дистанции обнаруживать опасное сближение с любыми объектами (людьми, препятствиями, другими погрузчиками). Такие приборы безопасности обычно имеют жёлтый цвет, поэтому их легче идентифицировать, даже издалека.
Лидары безопасности, как и прочие устройства безопасности, имеют особую конструкцию и требования к сертификации: два независимых измерительных канала внутри одного прибора, обычно один канал отслеживает исправность второго канала. Такими техническими способами достигается гораздо бОльшая надёжность, бОльшая наработка на отказ устройств безопасности по сравнению с общетехническими устройствами.

Беспилотный автомобиль Камаз.
Задача: перемещение беспилотного грузового автомобиля вне помещений по определённой траектории.
Камский автозавод уже несколько лет занимается тематикой беспилотного автотранспорта.
Например, разработан заводом проект тяжёлого тягача для работы в карьерах (не для дорог общего пользования).
На фотографии – среднетоннажный грузовик с беспилотным управлением. Основные оптические измерительные узлы расположены над кабиной:
-лидар компании Sick (вероятно, для контроля ближних дистанций),
-лидар компании Velodyne (вероятно, для контроля средних дистанций),
-очевидно, что имеется и прочее оптическое оборудование.
Видео с телеграм-канала "ДатчикиNews" : https://t.me/sensorsnews/745
На видео: передвижение грузовой платформы.
Задача: перемещение грузовой платформы с погруженным на неё автомобилем внутри помещения.
Автоматическая тележка подъезжает под автомобиль, захватывает автомобиль и транспортирует автомобиль к месту парковки. Аналогично – назад. Очевидно, что такие грузовые тележки должны иметь разнообразные датчики, лидары.
Видео с телеграм-канала "ДатчикиNews" : https://t.me/sensorsnews/747
На видео: передвижение робота в пространстве.
Задача: передвижение робота с максимально возможной скоростью.
Очевидно, что такой автономный робот имеет множество датчиков: оптические датчики для ориентации в пространстве, многоосевые акселерометры, датчики положения отдельных механизмов, наверняка что-то ещё.
Вывод: во всех вышеприведённых задачах автоматизации в той или иной степени требуется определять положение в пространстве, измерять расстояние до объекта, вычислять параметры движения, то есть необходимы датчики движения, датчики положения, датчики приближения.
Полезные ссылки:

Портал с разнообразной, интересной, систематизированной информацией о датчиках. Смежные знания.
Узнать больше